
研究シーズの内容
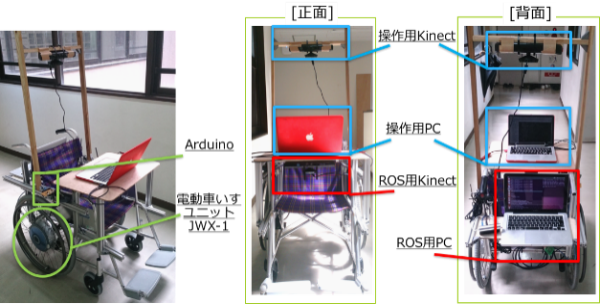
本研究では,視線追跡機器と深度センサを用いた電動車いす(図1)の視線走行及び自律走行を複合したシステムの開発を目的としている.ユーザの意図を電動車いすへフィードバックすることで負担を軽減しつつ,シームレスな走行を実現するために,視線情報に移動の意図が表出していると考え,自律走行時のユーザの注視行動分析を行った.実験結果(図2)から自律走行時に特定方向へ進行したい場合は,その意図は視線動作に表れることが知見として得られた.今後は,特定条件下での走行における視線データを収集し,ユーザの運動意図の分類を行う. 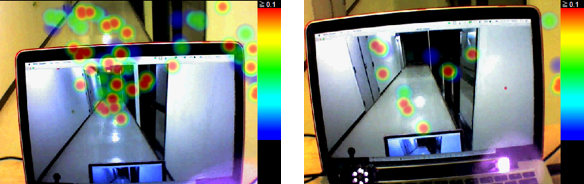
・図1 開発した電動車いすの外観図
・(a)走行全体 (b)別方向への移動を意図
図2 自律走行時の注視行動
実用化イメージ
分野および用途
● 視線を用いたコンピュータ操作
● 視線追跡、画像処理、自己位置推定、VRプログラミング等に関する技術相談
関連する特許や論文等
1)(発表論文)ヘッドマウントディスプレイを用いた歩行リハビリテーションシステムの基礎研究, ロボティクス・メカトロニクス講演会2015(ROBOMECH’15), 2015
2)(発表論文)ディープニューラルネットワークによる画像からの表情表現の学習, 2015年度人工知能学会全国大会(第29回), 2015